Understanding and Utilizing Occupancy Grid Maps
Related Articles: Understanding and Utilizing Occupancy Grid Maps
Introduction
With great pleasure, we will explore the intriguing topic related to Understanding and Utilizing Occupancy Grid Maps. Let’s weave interesting information and offer fresh perspectives to the readers.
Table of Content
Understanding and Utilizing Occupancy Grid Maps
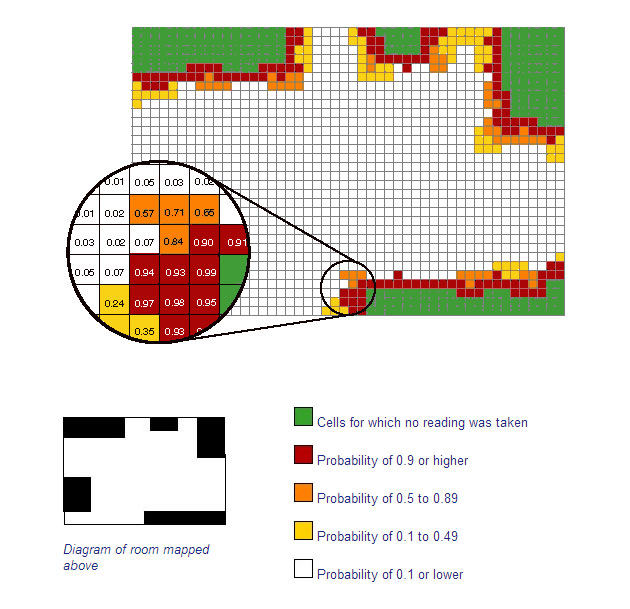
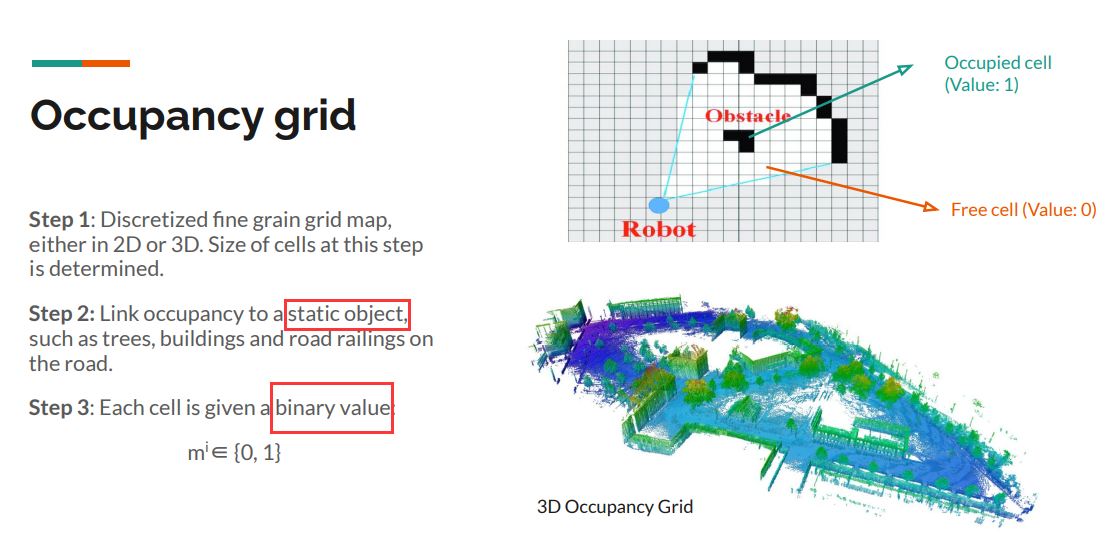
Occupancy grid mapping is a fundamental technique in robotics and autonomous systems for representing the environment. This method constructs a grid-based map where each cell represents a small area in the real world, assigning a probability of occupancy to each cell. This probabilistic approach allows for handling uncertainty inherent in sensor data, providing a robust and adaptable representation of the surrounding space.
The Mechanics of Occupancy Grid Map Creation
The process typically begins with sensor data acquisition. Sensors like lidar, radar, or cameras provide range measurements, indicating the distance to obstacles. This raw sensor data is inherently noisy and incomplete; objects might be partially obscured, and sensor readings may be inaccurate due to environmental factors like reflections or interference.
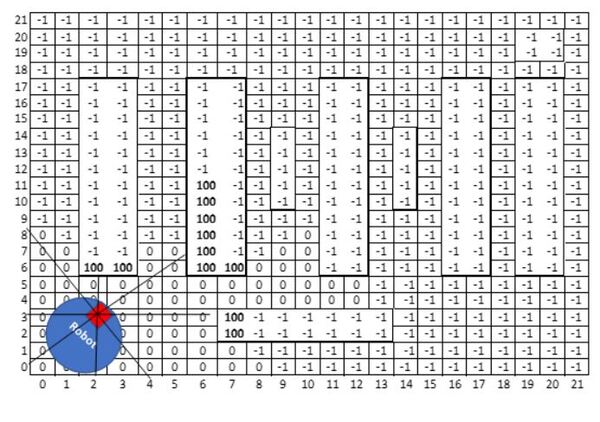
Algorithms then process this raw data to update the occupancy probabilities in the grid. A common approach uses Bayesian inference. Each sensor measurement updates the probability of a cell being occupied based on the likelihood of the sensor reading given the cell’s occupancy state. A cell’s probability is initialized to an uninformative prior, often 0.5, representing equal probability of occupancy and emptiness. As more measurements are collected, the probability converges towards 0 (empty) or 1 (occupied). Thresholds are often applied to classify cells as definitively occupied or free.
Beyond Simple Occupancy: Incorporating Uncertainty
The probabilistic nature of occupancy grid maps is crucial. It allows the system to represent uncertainty explicitly. A cell with a probability of 0.7 occupied doesn’t imply absolute certainty; it reflects the confidence level based on available data. This uncertainty is critical for safe navigation and decision-making. A robot can plan paths considering the uncertainty associated with each cell, avoiding potentially hazardous areas even if their occupancy is not definitively established.
Data Fusion and Map Refinement
Multiple sensor readings can be fused to improve map accuracy. Data from different sensors, such as lidar and cameras, can be combined to create a more comprehensive and robust representation of the environment. Data fusion techniques leverage the strengths of individual sensors, mitigating their weaknesses. For example, lidar excels at detecting distances, while cameras provide richer visual information about object characteristics. Combining these data sources significantly improves the overall map quality.
Applications and Significance
Occupancy grid maps find wide application in various domains. In robotics, they are fundamental for navigation, path planning, and obstacle avoidance. Autonomous vehicles rely heavily on occupancy grids to perceive their surroundings and make safe driving decisions. Mobile robots in warehouses, hospitals, and other environments utilize these maps for efficient and collision-free movement.
Beyond robotics, occupancy grids have applications in other fields. They are used in virtual reality and augmented reality systems to represent and interact with virtual environments. In geographic information systems (GIS), they can provide a simplified representation of terrain for various applications. The ability to represent and update the spatial understanding of the environment is a crucial element in many advanced systems.
Addressing Common Questions
-
Q: What are the limitations of occupancy grid maps? A: Occupancy grids can be computationally expensive, particularly with high-resolution maps and large environments. They also struggle with dynamic environments, where objects move frequently, requiring constant updates. Furthermore, representing complex shapes accurately can be challenging, leading to potential inaccuracies in representing thin objects or those with intricate geometries.
-
Q: How does map resolution affect performance? A: Higher resolution maps provide greater detail but increase computational cost and storage requirements. Lower resolution maps are less computationally demanding but may lack the precision needed for complex tasks. Selecting the appropriate resolution involves balancing detail with computational efficiency.
-
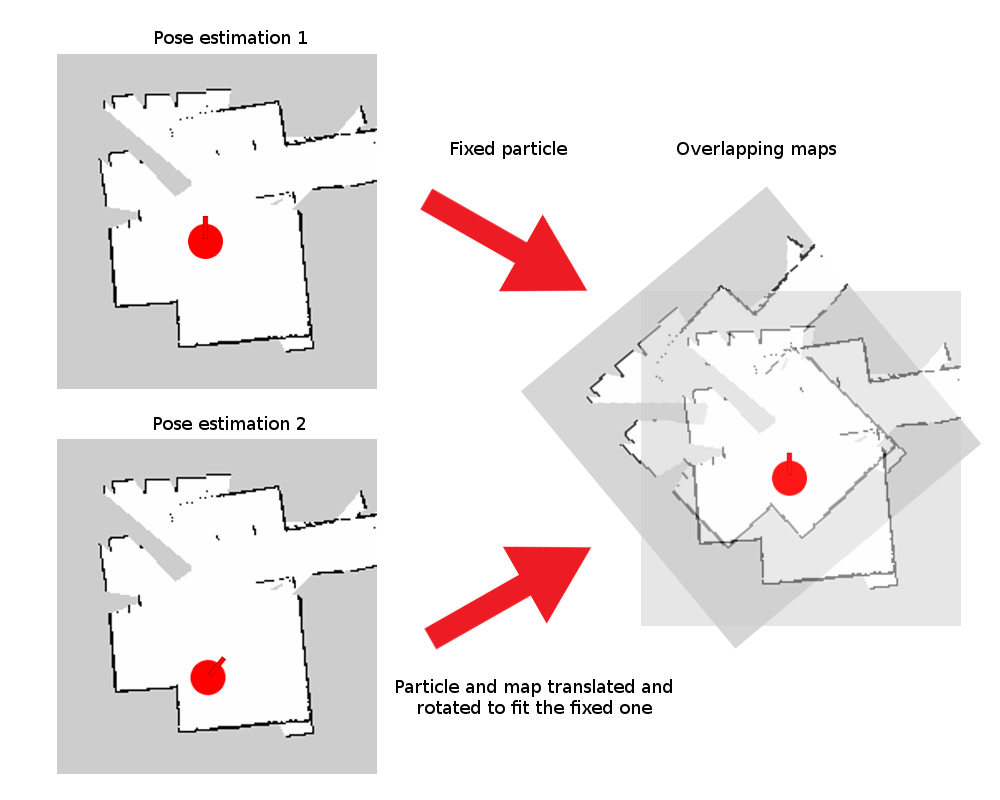
Q: How are occupancy grids updated in dynamic environments? A: Various techniques are employed to handle dynamic environments. These include incorporating temporal information, tracking moving objects, and using techniques like particle filters to estimate the location and movement of objects. These methods allow the map to adapt to changes in the environment.
-
Q: What data structures are typically used to implement occupancy grids? A: Occupancy grids are often implemented using arrays or matrices, where each element represents a cell’s occupancy probability. Efficient data structures and algorithms are crucial for handling large maps and performing rapid updates.
Practical Tips for Effective Occupancy Grid Mapping
-
Sensor Selection: Choose sensors appropriate for the environment and application. Consider the range, accuracy, and field of view of different sensors.
-
Data Preprocessing: Implement robust data preprocessing techniques to filter noise and outliers in sensor data.
-
Parameter Tuning: Carefully tune algorithm parameters, such as the update probabilities and thresholds, to optimize map accuracy and performance.
-
Map Management: Employ efficient data structures and algorithms to manage large maps and ensure efficient updates.
-
Integration with other systems: Seamlessly integrate the occupancy grid map with other components of the autonomous system, such as path planners and controllers.
Conclusion
Occupancy grid mapping provides a powerful and versatile method for representing the environment in a probabilistic manner. Its ability to handle uncertainty, integrate data from multiple sources, and adapt to dynamic environments makes it a crucial technology in various applications, particularly in robotics and autonomous systems. Continuous research and development in this area are pushing the boundaries of what is possible, leading to more robust, efficient, and reliable systems for navigating and interacting with the world around us. The ongoing refinement of algorithms and integration with advanced sensor technologies will continue to enhance the capabilities and broaden the scope of applications for occupancy grid mapping.




Closure
Thus, we hope this article has provided valuable insights into Understanding and Utilizing Occupancy Grid Maps. We thank you for taking the time to read this article. See you in our next article!